ESPでやろうと思ったが結構ソースが面倒な感じだ。pythonでやりたいかな。ESPはこちらが主力な方法か。ライブラリの関数(メソッドか)に隠ぺいされて何だか返って分からない。ラズパイのI2C関数で意識させてプログラムの方がいいな。まあライブラリ頼みいいか悪いかは個々の判断だから。楽がなによりだ。まずは出来ること優先は正しい。
●ラズパイで先行することに
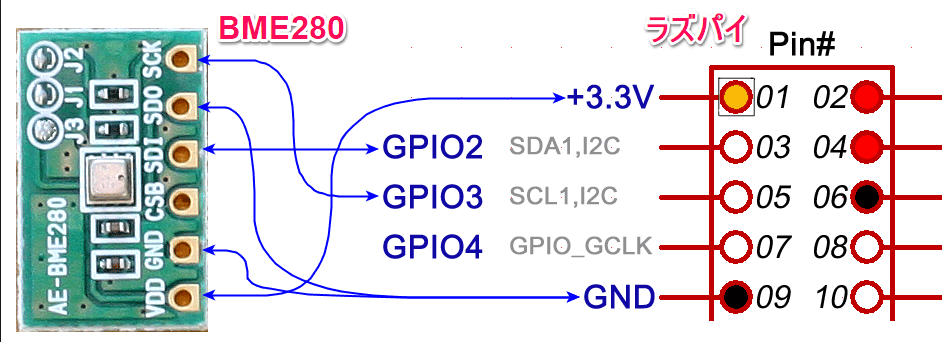
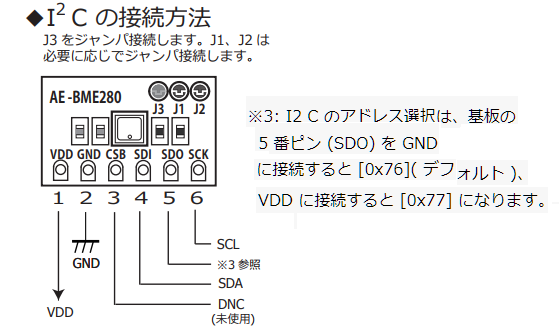
●ラズパイのソース(多謝)
#coding: utf-8
import smbus
import time
import datetime
bus_number = 1
i2c_address = 0x76
bus = smbus.SMBus(bus_number)
digT = []
digP = []
digH = []
t_fine = 0.0
sensor_data = {'temp':'0.0', 'pressure':'0.0','humidity':'0.0'}
def writeReg(reg_address, data):
bus.write_byte_data(i2c_address,reg_address,data)
def get_calib_param():
calib = []
for i in range (0x88,0x88+24):
calib.append(bus.read_byte_data(i2c_address,i))
calib.append(bus.read_byte_data(i2c_address,0xA1))
for i in range (0xE1,0xE1+7):
calib.append(bus.read_byte_data(i2c_address,i))
digT.append((calib[1] << 8) | calib[0])
digT.append((calib[3] << 8) | calib[2])
digT.append((calib[5] << 8) | calib[4])
digP.append((calib[7] << 8) | calib[6])
digP.append((calib[9] << 8) | calib[8])
digP.append((calib[11]<< 8) | calib[10])
digP.append((calib[13]<< 8) | calib[12])
digP.append((calib[15]<< 8) | calib[14])
digP.append((calib[17]<< 8) | calib[16])
digP.append((calib[19]<< 8) | calib[18])
digP.append((calib[21]<< 8) | calib[20])
digP.append((calib[23]<< 8) | calib[22])
digH.append( calib[24] )
digH.append((calib[26]<< 8) | calib[25])
digH.append( calib[27] )
digH.append((calib[28]<< 4) | (0x0F & calib[29]))
digH.append((calib[30]<< 4) | ((calib[29] >> 4) & 0x0F))
digH.append( calib[31] )
for i in range(1,2):
if digT[i] & 0x8000:
digT[i] = (-digT[i] ^ 0xFFFF) + 1
for i in range(1,8):
if digP[i] & 0x8000:
digP[i] = (-digP[i] ^ 0xFFFF) + 1
for i in range(0,6):
if digH[i] & 0x8000:
digH[i] = (-digH[i] ^ 0xFFFF) + 1
def readData():
data = []
for i in range (0xF7, 0xF7+8):
data.append(bus.read_byte_data(i2c_address,i))
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4)
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4)
hum_raw = (data[6] << 8) | data[7]
compensate_T(temp_raw)
compensate_P(pres_raw)
compensate_H(hum_raw)
def compensate_P(adc_P):
global t_fine
pressure = 0.0
v1 = (t_fine / 2.0) - 64000.0
v2 = (((v1 / 4.0) * (v1 / 4.0)) / 2048) * digP[5]
v2 = v2 + ((v1 * digP[4]) * 2.0)
v2 = (v2 / 4.0) + (digP[3] * 65536.0)
v1 = (((digP[2] * (((v1 / 4.0) * (v1 / 4.0)) / 8192)) / 8) + ((digP[1] * v1) / 2.0)) / 262144
v1 = ((32768 + v1) * digP[0]) / 32768
if v1 == 0:
return 0
pressure = ((1048576 - adc_P) - (v2 / 4096)) * 3125
if pressure < 0x80000000:
pressure = (pressure * 2.0) / v1
else:
pressure = (pressure / v1) * 2
v1 = (digP[8] * (((pressure / 8.0) * (pressure / 8.0)) / 8192.0)) / 4096
v2 = ((pressure / 4.0) * digP[7]) / 8192.0
pressure = pressure + ((v1 + v2 + digP[6]) / 16.0)
print ("気圧 : %7.2f hPa" % (pressure/100))
#sensor_data['pressure'] = pressure/100
def compensate_T(adc_T):
global t_fine
v1 = (adc_T / 16384.0 - digT[0] / 1024.0) * digT[1]
v2 = (adc_T / 131072.0 - digT[0] / 8192.0) * (adc_T / 131072.0 - digT[0] / 8192.0) * digT[2]
t_fine = v1 + v2
temperature = t_fine / 5120.0
print ("温度 : %-6.2f ℃" % (temperature))
#sensor_data['temp'] = temperature
def compensate_H(adc_H):
global t_fine
var_h = t_fine - 76800.0
if var_h != 0:
var_h = (adc_H - (digH[3] * 64.0 + digH[4]/16384.0 * var_h)) * (digH[1] / 65536.0 * (1.0 + digH[5] / 67108864.0 * var_h * (1.0 + digH[2] / 67108864.0 * var_h)))
else:
return 0
var_h = var_h * (1.0 - digH[0] * var_h / 524288.0)
if var_h > 100.0:
var_h = 100.0
elif var_h < 0.0:
var_h = 0.0
print ("湿度 : %6.2f %" % (var_h))
#sensor_data['humidity'] = var_h
def setup():
osrs_t = 1 #Temperature oversampling x 1
osrs_p = 1 #Pressure oversampling x 1
osrs_h = 1 #Humidity oversampling x 1
mode = 3 #Normal mode
t_sb = 5 #Tstandby 1000ms
filter = 0 #Filter off
spi3w_en = 0 #3-wire SPI Disable
ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode
config_reg = (t_sb << 5) | (filter << 2) | spi3w_en
ctrl_hum_reg = osrs_h
writeReg(0xF2,ctrl_hum_reg)
writeReg(0xF4,ctrl_meas_reg)
writeReg(0xF5,config_reg)
setup()
get_calib_param()
#if __name__ == '__main__':
while 1:
try:
print("---------")
readData()
time_str = datetime.datetime.today().strftime("%Y/%m/%d %H:%M:%S")
temp_str = str(sensor_data['temp'])
humid_str = str(sensor_data['humidity'])
pressure_str = str(sensor_data['pressure'])
# print(sensor_data)
#print(time_str+","+temp_str+","+humid_str+","+pressure_str)
time.sleep(1)
except KeyboardInterrupt:
break
#pass
●以下ESP8266での使用ソース
#define D0 16 #define D1 5 // I2C Bus SCL (clock) #define D2 4 // I2C Bus SDA (data) #define D3 0 #define D4 2 // Same as "LED_BUILTIN", but inverted logic #define D5 14 // SPI Bus SCK (clock) #define D6 12 // SPI Bus MISO #define D7 13 // SPI Bus MOSI #define D8 15 // SPI Bus SS (CS) #define D9 3 // RX0 (Serial console) #define D10 1 // TX0 (Serial console)
/*
Copyright (c) 2015, Embedded Adventures
All rights reserved.
Contact us at source [at] embeddedadventures.com
www.embeddedadventures.com
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
- Redistributions of source code must retain the above copyright notice,
this list of conditions and the following disclaimer.
- Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
- Neither the name of Embedded Adventures nor the names of its contributors
may be used to endorse or promote products derived from this software
without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF
THE POSSIBILITY OF SUCH DAMAGE.
*/
// BME280 MOD-1022 weather multi-sensor Arduino demo
// Written originally by Embedded Adventures
#include <BME280_MOD-1022.h>
#include <Wire.h>
// Arduino needs this to pring pretty numbers
void printFormattedFloat(float x, uint8_t precision) {
char buffer[10];
dtostrf(x, 7, precision, buffer);
Serial.print(buffer);
}
// print out the measurements
void printCompensatedMeasurements(void) {
float temp, humidity, pressure, pressureMoreAccurate;
double tempMostAccurate, humidityMostAccurate, pressureMostAccurate;
char buffer[80];
temp = BME280.getTemperature();
humidity = BME280.getHumidity();
pressure = BME280.getPressure();
pressureMoreAccurate = BME280.getPressureMoreAccurate(); // t_fine already calculated from getTemperaure() above
tempMostAccurate = BME280.getTemperatureMostAccurate();
humidityMostAccurate = BME280.getHumidityMostAccurate();
pressureMostAccurate = BME280.getPressureMostAccurate();
Serial.println(" Good Better Best");
Serial.print("Temperature ");
printFormattedFloat(temp, 2);
Serial.print(" ");
printFormattedFloat(tempMostAccurate, 2);
Serial.println();
Serial.print("Humidity ");
printFormattedFloat(humidity, 2);
Serial.print(" ");
printFormattedFloat(humidityMostAccurate, 2);
Serial.println();
Serial.print("Pressure ");
printFormattedFloat(pressure, 2);
Serial.print(" ");
printFormattedFloat(pressureMoreAccurate, 2);
Serial.print(" ");
printFormattedFloat(pressureMostAccurate, 2);
Serial.println();
}
// setup wire and serial
void setup()
{
Wire.begin(); // Wire.begin(sda, scl)
pinMode(12, OUTPUT);
Serial.begin(115200);
}
// main loop
void loop()
{
uint8_t chipID;
Serial.println();
Serial.println();
Serial.println("Welcome to the BME280 MOD-1022 weather multi-sensor test sketch!");
Serial.println("Embedded Adventures (www.embeddedadventures.com)");
chipID = BME280.readChipId();
// find the chip ID out just for fun
Serial.print("ChipID = 0x");
Serial.println(chipID, HEX);
// need to read the NVM compensation parameters
BME280.readCompensationParams();
// Need to turn on 1x oversampling, default is os_skipped, which means it doesn't measure anything
BME280.writeOversamplingPressure(os1x); // 1x over sampling (ie, just one sample)
BME280.writeOversamplingTemperature(os1x);
BME280.writeOversamplingHumidity(os1x);
// example of a forced sample. After taking the measurement the chip goes back to sleep
BME280.writeMode(smForced);
while (BME280.isMeasuring()) {
Serial.println("Measuring...");
delay(50);
}
Serial.println("Done!");
// read out the data - must do this before calling the getxxxxx routines
BME280.readMeasurements();
Serial.print("Temp=");
Serial.println(BME280.getTemperature()); // must get temp first
Serial.print("Humidity=");
Serial.println(BME280.getHumidity());
Serial.print("Pressure=");
Serial.println(BME280.getPressure());
Serial.print("PressureMoreAccurate=");
Serial.println(BME280.getPressureMoreAccurate()); // use int64 calculcations
Serial.print("TempMostAccurate=");
Serial.println(BME280.getTemperatureMostAccurate()); // use double calculations
Serial.print("HumidityMostAccurate=");
Serial.println(BME280.getHumidityMostAccurate()); // use double calculations
Serial.print("PressureMostAccurate=");
Serial.println(BME280.getPressureMostAccurate()); // use double calculations
// Example for "indoor navigation"
// We'll switch into normal mode for regular automatic samples
BME280.writeStandbyTime(tsb_0p5ms); // tsb = 0.5ms
BME280.writeFilterCoefficient(fc_16); // IIR Filter coefficient 16
BME280.writeOversamplingPressure(os16x); // pressure x16
BME280.writeOversamplingTemperature(os2x); // temperature x2
BME280.writeOversamplingHumidity(os1x); // humidity x1
BME280.writeMode(smNormal);
while (1) {
digitalWrite(12, HIGH);
while (BME280.isMeasuring()) {
}
// read out the data - must do this before calling the getxxxxx routines
BME280.readMeasurements();
printCompensatedMeasurements();
delay(1000);
Serial.println();
digitalWrite(12, LOW);
delay(1000);
}
}
No tags for this post.